728x90
반응형
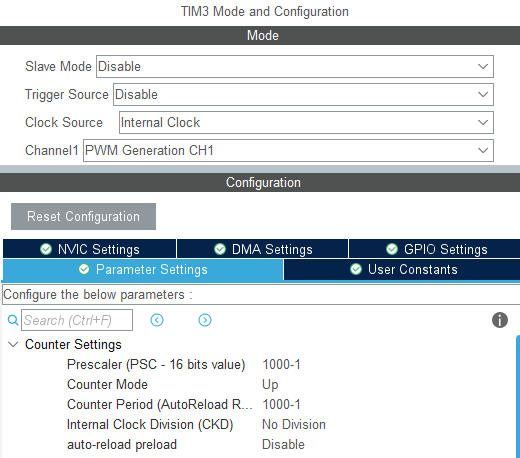
[PWM]
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
uint8_t rxData[1];
uint8_t duty[3];
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
HAL_UART_Receive_IT(&huart2, rxData, sizeof(rxData)); // input from uart2
HAL_UART_Receive_IT(&huart1, rxData, sizeof(rxData)); // input from uart2
HAL_UART_Transmit_IT(&huart2, rxData, sizeof(rxData)); // output to uart2
HAL_UART_Transmit_IT(&huart1, rxData, sizeof(rxData)); // output to uart2
}
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
// uint16_t dutyValue;
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM3_Init();
MX_USART2_UART_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
HAL_UART_Receive_IT(&huart1, rxData, sizeof(rxData));
HAL_UART_Receive_IT(&huart2, rxData, sizeof(rxData));
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
for(int i = 0 ; i < 10000 ; i++)
{
TIM3->CCR1 = i;
HAL_Delay(1);
}
}
/* USER CODE END 3 */
}
UART로 값을 입력해서 duty cycle을 조정해보자.
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(rxData[0] == 'a' || rxData[0] == 'b' || rxData[0] == 'c' || rxData[0] == 'd')
{
dutyValue = rxData[0];
switch(dutyValue)
{
case 'a' :
TIM3->CCR1 = 250; // 25% duty
break;
case 'b' :
TIM3->CCR1 = 500; // 50% duty
break;
case 'c' :
TIM3->CCR1 = 750; // 75% duty
break;
case 'd' :
TIM3->CCR1 = 0; // 0% duty
break;
}
}
}
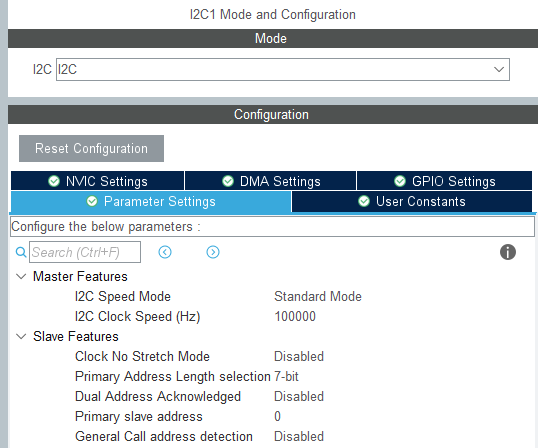
[I2C]
#ifndef INC_I2C_LCD_H_
#define INC_I2C_LCD_H_
#include "stm32f4xx_hal.h" // 얘가 있어야 HAL 함수를 쓸 수 있다.
void lcd_init();
void lcd_send_cmd(char cmd);
void lcd_send_data(char data);
void lcd_send_string(char *str);
void lcd_put_cur(int row, int col);
void lcd_clear();
#endif /* INC_I2C_LCD_H_ */
#include "I2C_LCD.h"
extern I2C_HandleTypeDef hi2c1; // hi2c1이 외부에 선언되었다는 뜻
#define SLAVE_ADDRES_LCD 0x27<<1
void lcd_init()
{
// cmd init
HAL_Delay(50);
lcd_send_cmd(0x30);
HAL_Delay(5);
lcd_send_cmd(0x30);
HAL_Delay(1);
lcd_send_cmd(0x30);
HAL_Delay(10);
lcd_send_cmd(0x20); // 4bit mode
HAL_Delay(10);
// display init
lcd_send_cmd(0x28); // function set
HAL_Delay(1);
lcd_send_cmd(0x08); // display off
HAL_Delay(1);
lcd_send_cmd(0x01); // clear display
HAL_Delay(1);
lcd_send_cmd(0x06); // entry mode
HAL_Delay(1);
lcd_send_cmd(0x0C); // display on
}
void lcd_send_cmd(char cmd)
{
char data_u, data_l;
uint8_t data_t[4];
data_u = (cmd & 0xf0); // msb쪽 4bit만 남기고 나머지 다 버림.
data_l = ((cmd << 4) & 0xf0); // lsb쪽 4bit만 님기고 나머지 다 버림.
data_t[0] = data_u | 0x0C; // en = 1, rs = 0
data_t[1] = data_u | 0x08; // en = 0, rs = 0
data_t[2] = data_l | 0x0C; // en = 1, rs = 0
data_t[3] = data_l | 0x08; // en = 0, rs = 0
HAL_I2C_Master_Transmit(&hi2c1, SLAVE_ADDRES_LCD, (uint8_t *)data_t, 4, 100);
}
void lcd_send_data(char data)
{
char data_u, data_l;
uint8_t data_t[4];
data_u = (data & 0xf0); // msb쪽 4bit만 남기고 나머지 다 버림.
data_l = ((data << 4) & 0xf0); // lsb쪽 4bit만 님기고 나머지 다 버림.
data_t[0] = data_u | 0x0D; // en = 1, rs = 0
data_t[1] = data_u | 0x09; // en = 0, rs = 0
data_t[2] = data_l | 0x0D; // en = 1, rs = 0
data_t[3] = data_l | 0x09; // en = 0, rs = 0
HAL_I2C_Master_Transmit(&hi2c1, SLAVE_ADDRES_LCD, (uint8_t *)data_t, 4, 100);
}
void lcd_send_string(char *str)
{
while(*str) lcd_send_data(*str++); // *str이 참이면, lcd_send_data(*str++) 실행
}
void lcd_put_cur(int row, int col)
{
switch (row)
{
case 0:
col |= 0x80;
break;
case 1:
col |= 0xC0;
break;
}
lcd_send_cmd(col);
}
void lcd_clear()
{
lcd_send_cmd (0x80);
for (int i=0 ; i<70 ; i++)
{
lcd_send_data(' ');
}
}
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "i2c.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "I2C_LCD.h"
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
uint16_t count = 0;
uint8_t buff[30];
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C1_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
HAL_Delay(1000); // 통신 되게 느리니까 적당히 주자.
lcd_init();
lcd_send_string("Hello HARMAN"); // 12글자
HAL_Delay(500);
lcd_put_cur(1, 0); // 다음 행으로 커서 이동
lcd_send_string("TEST LCD COM!"); // 12글자
HAL_Delay(1000);
lcd_clear();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
sprintf(buff, "count %-5d", count++);
lcd_put_cur(1, 0);
lcd_send_string(buff);
HAL_Delay(100);
}
/* USER CODE END 3 */
}
자율주행 프로젝트 진행 중...
728x90
반응형



